

2014 - / prototype
Prototype avec l'aide Alexandre Saunier (version 1) et Julien Gargot (version 2)
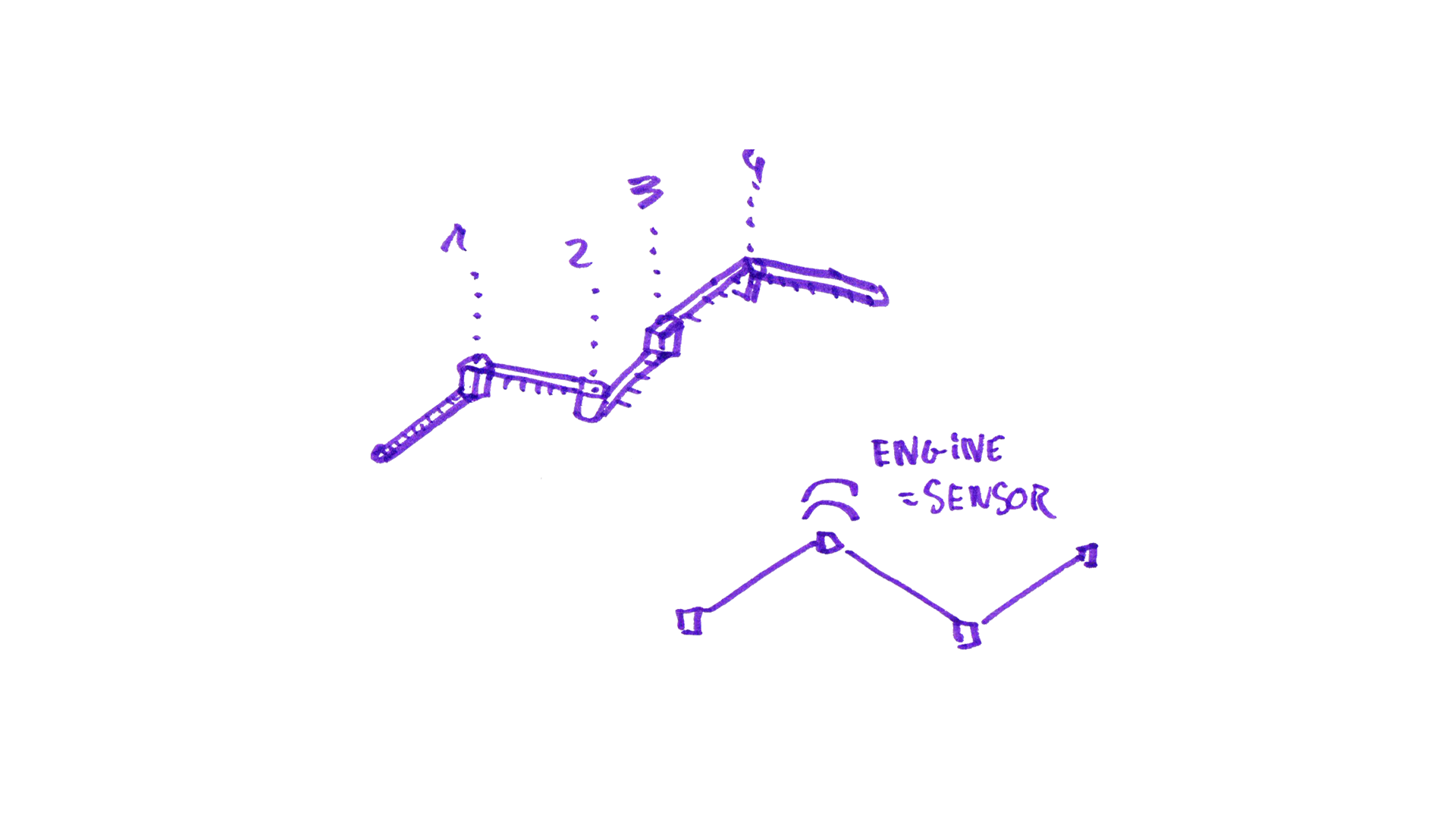
Un mètre de menuisiers de grande taille se déplace, par pli et dépli, tel un animal perdu dans la salle dans laquelle il est lâché, à la recherche de ce qu’il doit mesurer.
Ses articulations motorisées sont aussi des capteurs sensibles à la résistance de contours de l’espace. Quand l’opposition est trop forte, le mouvement s’arrête et laisse place à celui d’une autre articulation. C’est la combinaison de la morphologie et la sensibilité des articulations qui font émerger le comportement. Rien n’est numérisé, le mètre ne s’aide d’aucune représentation de l’espace, n’apprend rien, ne fait aucune tentative de computation ou de modélisation. Il n’a pas conscience de prendre une mesure. C’est seulement l’observateur qui va peu à partir de la position des segments déterminer les caractéristiques de l’espace.

Ars Electronica Festival (linz, austria), 2015.
C’est un instrument d’un nouveau genre. Il est autonome et subjectif. Il ne se fait pas petit, n’est pas très « smart » et ne sera pas miniaturisé. Il doit s’affirmer. C’est un enquêteur qui, par des suites de rencontres surprenantes, explore l’espace sans chercher à en dresser la carte.
Le projet « métre métrologue » met en œuvre le « MisB KIT » développé par l’équipe EnsadLab/Reflective Interaction, sous la direction de Samuel Bianchini, par Didier Bouchon, Cécile Bucher, Martin Gautron, Benoît Verjat et Alexandre Saunier avec le soutien du Labex Arts-H2H et de la Fondation Bettencourt Schueller dans le cadre de la Chaire Innovation et Savoir faire.












